Katsetused
24 V 80 A pulsilaiusmodulatsiooniga (PWM) tuuliku kontroller ja andmesalvesti
Tuulikuehitajate üks põhilisi murekohti on laadimiskontroller ehk seade, mis hoiaks ära elektrisüsteemi ülepinge. Sellise seadme ülesandeks on ülepinge tekkimisel lülitada elektrisüsteemi tarviti (küttekeha, hõõglambid), mis tekitaks tuulikule lisakoormust ja tooks pinge tagasi lubatud tasemele. Põhiliselt on selle eesmärgi täitmiseks kaks erinevat tehnoloogiat: kahepositsiooniline (releega) regulaator või pulsilaiusmodulatsiooniga (PWM) töötav regulaator.
Kahepositsiooniline ehk lisatarvitit relee abil sisse-välja lülitav variant on lihtne ja odav, kuid tekitab suuri pingekõikumisi, kuna korraga lülitatakse järgi tarviti, mis peab suutma vastu võtta generaatori koguvõimsuse. Võimalus on ka tarvitid mitmeks jagada ja pisut erinevatel pingetel rakendada, kuid see on ikkagi „pooltoores“ lahendus.
Pulsilaiusmodulatsiooniga töötavad kontrollerid annavad võrreldes kahepositsioonilistega oluliselt parema tulemuse, kuna lisatarviti lülitamine toimub jõupooljuhtide abil ja sujuvalt. Tuulikule rakendatakse täpselt nii palju lisakoormust, kui on tarvis konkreetse seadepinge hoidmiseks. PWM (vt joonis 1) tähendab sisuliselt seda, et koormust lülitatakse kindla perioodiga sisse-välja (mõni millisekund). Tarvitil eralduva võimsuse reguleerimiseks muudetakse aega (t), mille jooksul on signaal sisselülitatud olekus. Seda aega nimetetakse töötsükliks. Mida suurem on töötsükkel võrreldes lülituse perioodiga (T), seda võimsamalt tarviti töötab.
Joonis 1. Pulsilaiusmodulatsiooni tööpõhimõte
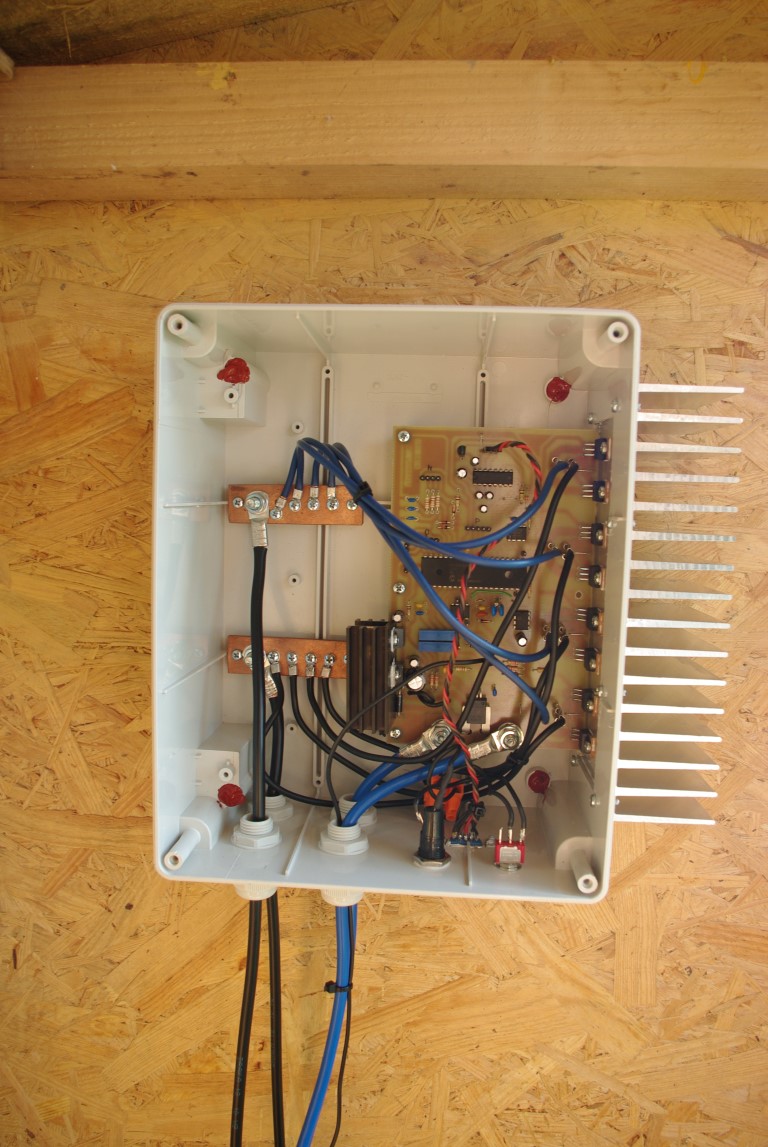
Turul pakutavatest PWM-kontrolleritest on ühed populaarsemad Tristar Morningstar TS-45 ja TS-60 (number näitab ampreid). Vt link: http://www.morningstarcorp.com/products/tristar/. Kuna vajadus oli pisut võimsama regulaatori järele, mis suudaks ka 80 A vastu võtta, sai kaalutud ise ehitamise võimalust. Sellest mõttest kasvas umbes aastaga välja korralik ja toimiv kontroller (vt joonis 2), mis lisaks põhifunktsioonile näitab ka laadimispinget ja voolu ning suudab need andmed mällu salvestada, mida saab omakorda hiljem arvutisse laadida.

Joonis 2. Kontroller tuuliku kilbiruumis (juuni 2013)
Valminud seade projekteeriti 24 V elektrisüsteemi jaoks, suutmaks lülitada kuni 80 A pidevat voolu. Esipaneelil paikneb 16x2 tähemärgiga LCD-ekraan, millelt näeb reaalajas tuuliku pinget, laadimisvoolu ja generaatori vahelduvpinge sagedust. Kolme juhtnupu abil saab seadistada tarviti rakendumise pingepiiri vahemikus 24,0-30,0 V. Lisaks on seadmele sisse ehitatud logifunktisoon, mis suudab salvestada nädala pikkuselt pinge ja voolu väärtusi (sissekanne iga minuti järel). Andmed on võimalik pärast üle RS-232 jadapordi arvutisse laadida ja tabelarvutusprogrammis analüüsida. Juhtelektroonika keskseks elemendiks on 8-bitine PIC16 mikrokontroller.
Järgnevalt paar fotot ehitamisest:

Joonis 3. Trükkplaat

Joonis 4. Karbi esialgne sisu

Joonis 5. Prototüüpimine
Joonis 6. Kontrolleri paigaldamine Leisis
2014. aasta lõpu seisuga töötab eelpool käsitletud kontrollereid Saaremaal kokku 3 tükki. Seade on aga pidevas arendamises ning peagi on loota USB-liidest ja iseseisvat Windowsi programmi, millega logiandmeid lugeda ja kontrollerit seadistada. Samuti on plaanis välja töötada andmeside üle kohtvõrgu, mille abil pääseks kontrollerile ligi läbi koduse arvutivõrgu mistahes arvutist.
Aado Toomsalu
4. jaanuar 2015